
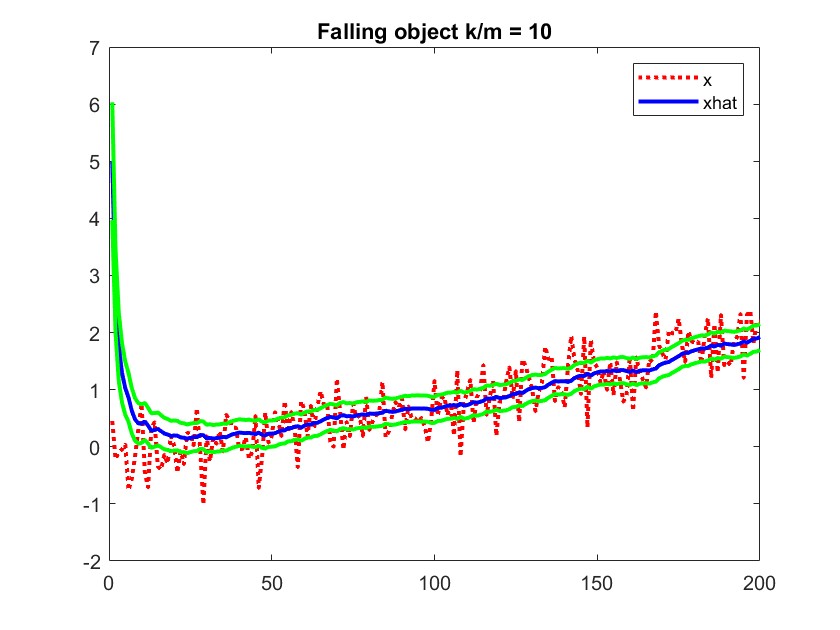
Représentation stochastique des systèmes dynamiques; filtrage de Kalman et extensions; observateur à horizon glissant; exercices.
- Titulaire: Alain VANDE WOUWER
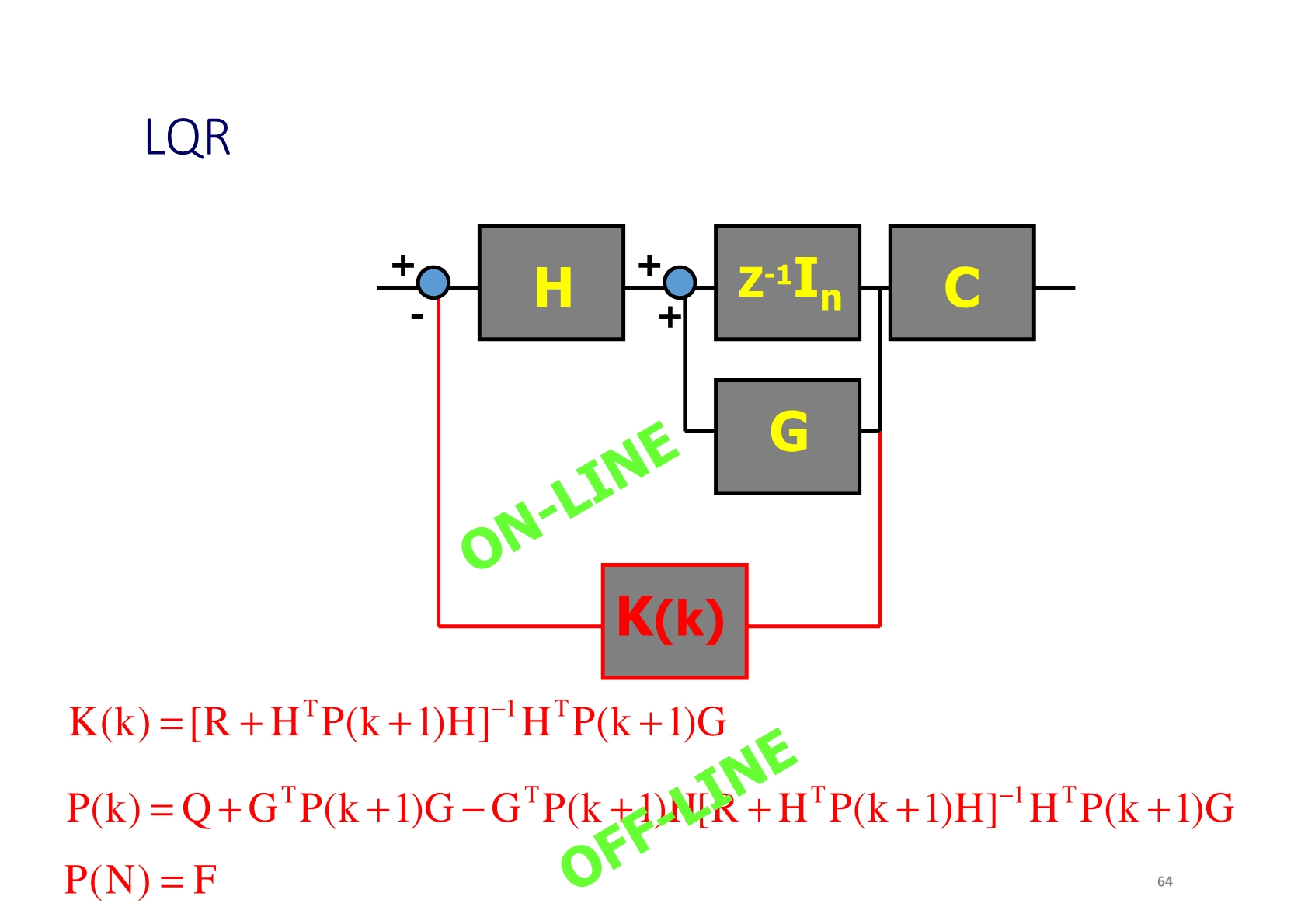
Régulateur linéaire quadratique; principe du maximum de Pontryagin; optimisation dynamique et commande prédictive; exercices.
- Titulaire: Alain VANDE WOUWER
Exploitation de concepts vus dans le cours "Control of Multivariable Systems" et introduction de concepts nouveaux en modélisation, estimation et commande des systèmes illustrées par des applications particulières (études de cas).
- Titulaire: Alain VANDE WOUWER
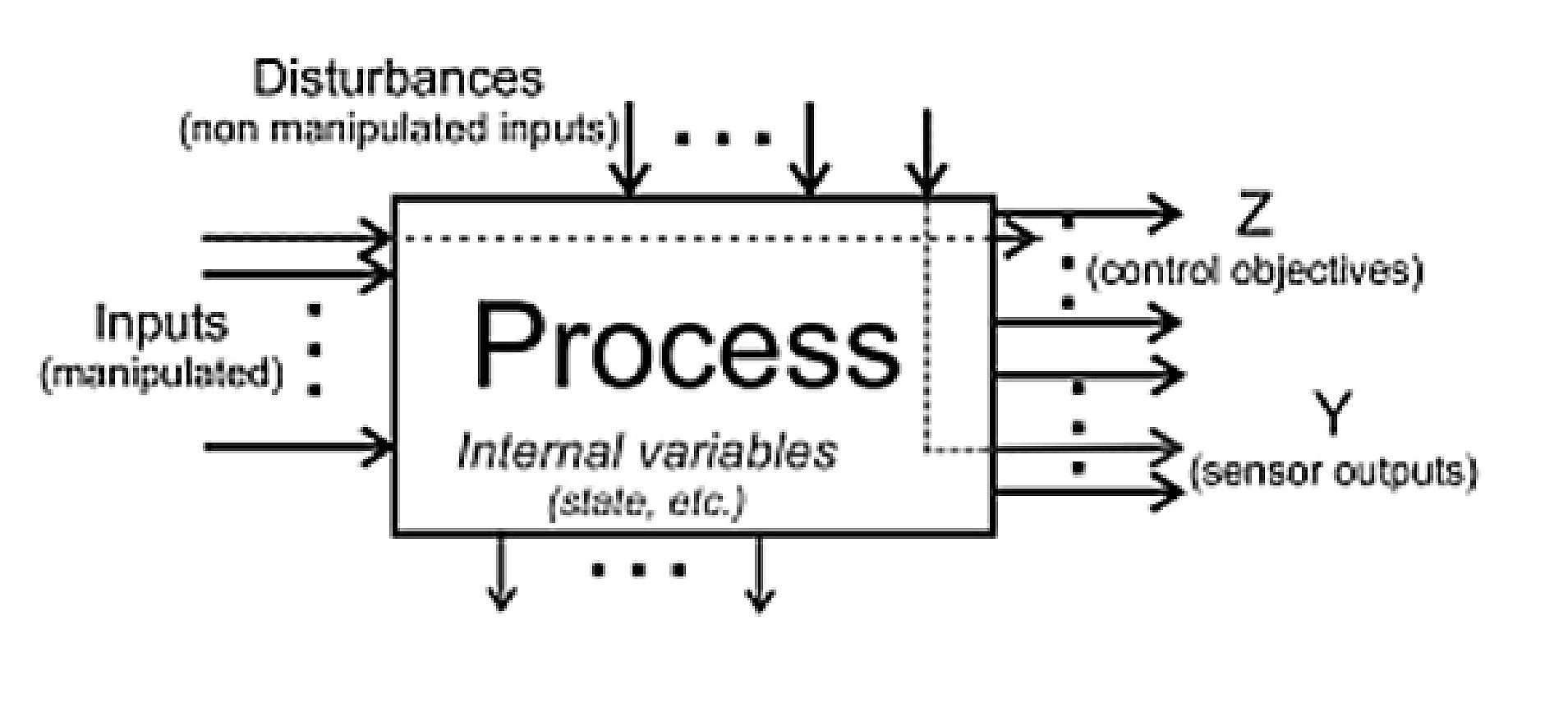
This course introduces various topics related to dynamic multivariable systems:
- (continuous-time and discrete-time) state equations;
- stability analysis;
- controllability and observability;
- subspace identification;
- state feedback control;
- state estimation and observer design for deterministic continuous-time and discrete-time systems.
- Titulaire: Alain VANDE WOUWER
- Co-titulaire: Christine RENOTTE
- Enseignant: Laurent DEWASME
Mons
Commande à temps continu : autres contrôleurs que le PID; synthèse des contrôleurs vis à vis de la perturbation; conception d'un système anti windup; lieux d'Evans; boucles de type cascade; commande par modèle; prédicteur de Smith;
Commande numérique : transformée en z; transmittance en z équivalente du procédé à temps continu; stabilité, précision et calcul de contrôleur d'une boucle numérique.
- Titulaire: Christine RENOTTE
- Enseignant: Alain VANDE WOUWER
- Assistant: Paul MICHEL
Charleroi
- Modélisation et analyse des systèmes : approche de modélisation ; linéarisation ; étude des systèmes du premier, du second ordre et d'ordre quelconque, conditions de stabilité; notions de modèle d'état ;
- Fonctionnement en boucle fermée : principe ; analyse de la stabilité en boucle fermée, concepts de précision et de performances transitoires ;
- Dimensionnement de régulateurs PID : stabilisation et contrôle par contrôleurs PID; méthodes expérimentales de réglage des contrôleurs PID.
- Titulaire: Christine RENOTTE
- Enseignant: Laurent DEWASME
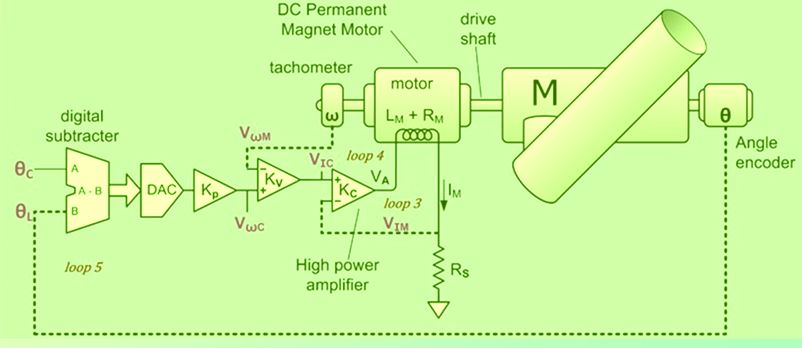
This course is devoted to electric actuators and discusses their characteristics and selection criteria depending on the application. The focus is on DC motors and stepper motors. Mathematical modeling of actuators and regulator design is discussed, including classic regulators (on-off and PID), RST control, and optimal and predictive control.
- Titulaire: Alain VANDE WOUWER
- Titulaire: Olivier VERLINDEN
- Enseignant: Laurent DEWASME
- Assistant: Nicolas CAPETTE
- Assistant: Florian DELOOZ
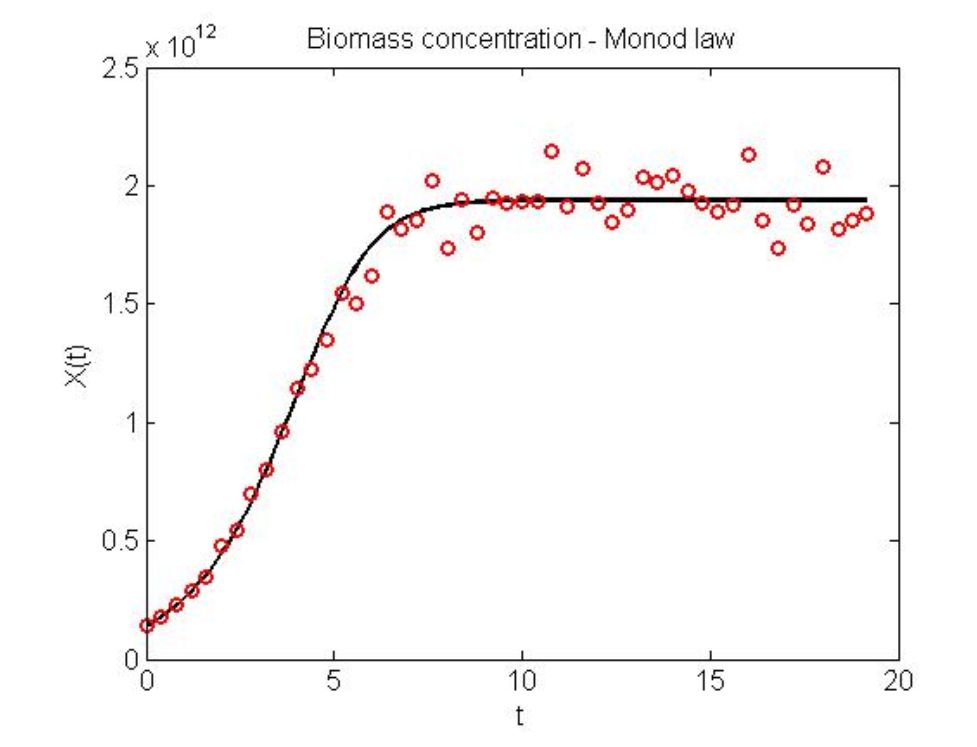
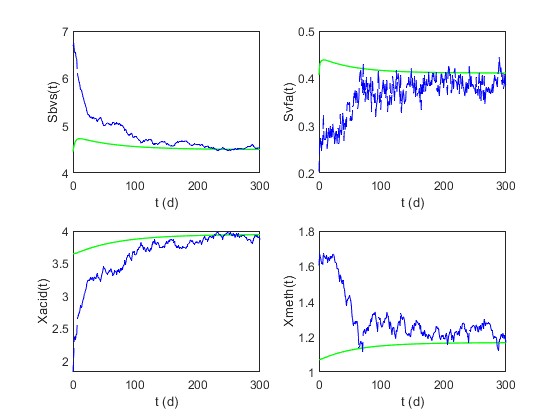
This course introduces various topics in dynamic system modeling, machine learning, parameter identification, and state estimation, with applications to biological and biomedical systems:
- Introduction to population models and epidemics;
- Dynamic models of bioprocesses (with examples in biopharmaceuticals, food, biofuels and environment);
- Numerical simulation of dynamic systems;
- Parameter identification (linear and nonlinear least-squares problems);
- Neural networks in dynamic modeling (NN and Physics-NN models).
- State estimation (observability of nonlinear systems and asymptotic observers);
- Titulaire: Alain VANDE WOUWER
- Enseignant: Laurent DEWASME
This course introduces optimal control and optimal state estimation of dynamic systems:
- Linear quadratic regulator (discrete-time and continuous-time versions);
- Pontryagin maximum principle;
- Model predictive control;
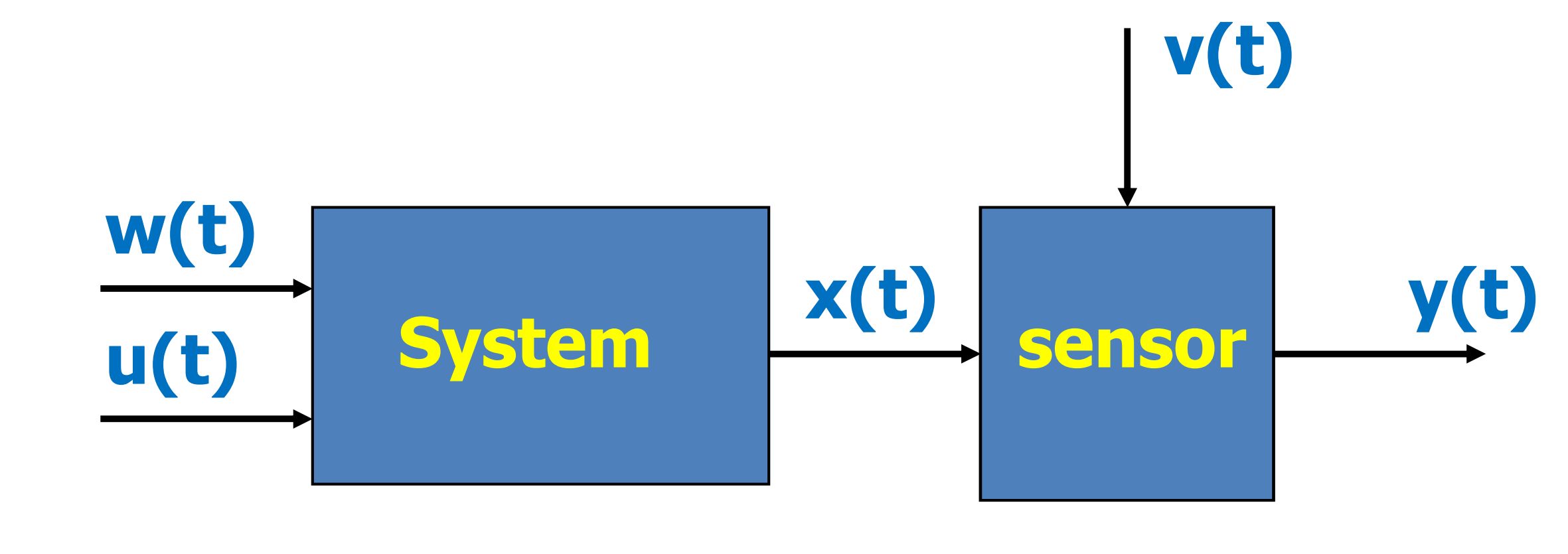
- Dynamic stochastic systems;
- Kalman filtering.
- Titulaire: Alain VANDE WOUWER
- Enseignant: Laurent DEWASME
- Assistant: Gilles DELANSNAY
- Assistant: Maxime MATON
- Signaux et convolution de signaux - Transformées de Laplace et de Fourier et interprétation physique.
- Introduction à la notion de système. Analyse temporelle et harmonique des systèmes linéaires permanents.
- Approche des systèmes en boucle fermée : stabilité, précision et performances transitoires.
- Principes généraux de dimensionnement d'un contrôleur.
- Titulaire: Thierry DUTOIT
- Titulaire: Christine RENOTTE
- Assistant: Antoine MAIORCA
- Assistant: Paul MICHEL
Signaux et convolution de signaux - Transformées de Laplace et de Fourier et interprétation physique. Introduction à la notion de système. Analyse temporelle et harmonique des systèmes linéaires permanents. Approche des systèmes en boucle fermée : stabilité, précision et performances transitoires. Principes généraux de dimensionnement d'un contrôleur.
- Titulaire: Thierry DUTOIT
- Titulaire: Christine RENOTTE
- Assistant: Antoine MAIORCA
- Assistant: Paul MICHEL
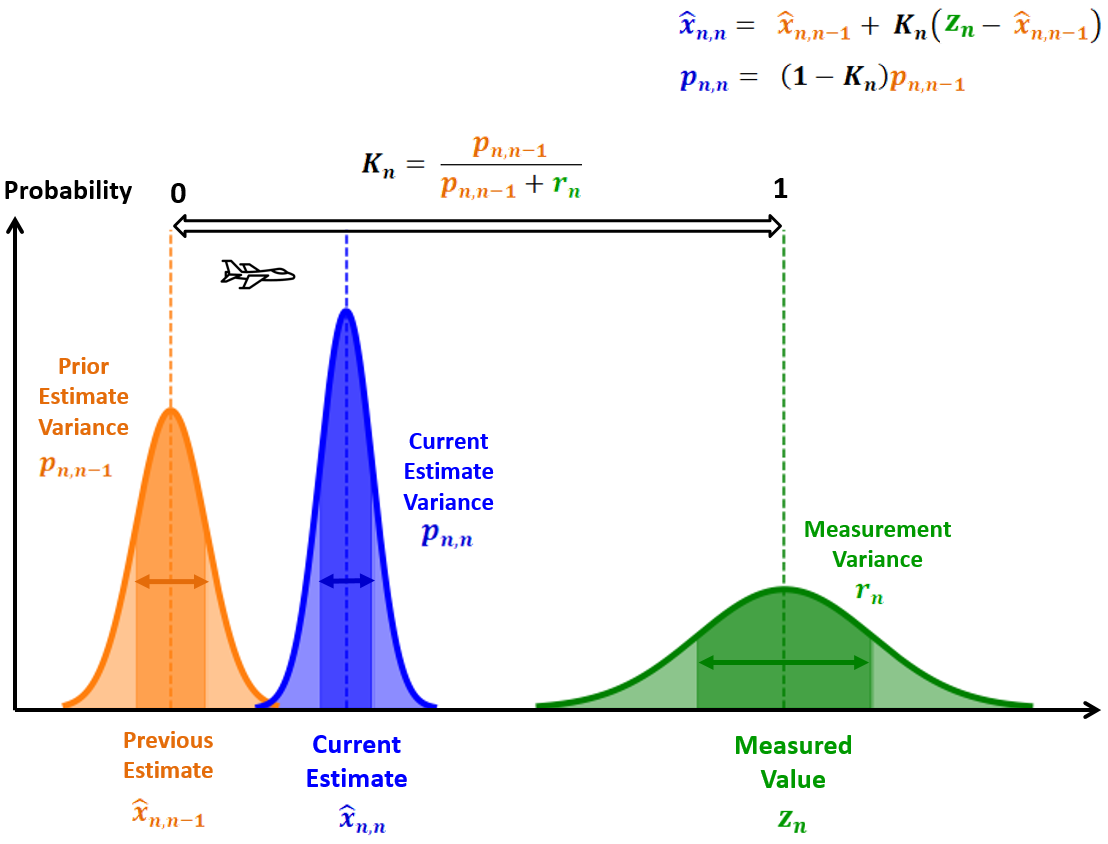
This course addresses various aspects of stochastic state space representation of dynamic systems, Kalman filtering, together with a few examples and exercises.
- Titulaire: Alain VANDE WOUWER
- Co-titulaire: Christine RENOTTE
- Enseignant: Laurent DEWASME
- Assistant: Gilles DELANSNAY
- Assistant: Maxime MATON